清华新闻网7月5日电 柔性微型机器人具有优良的环境适应性、行动隐蔽性和可集群化作业的特点,在灾后搜救、环境监测、侦察监听等隐蔽狭小空间作业场合具有极大的应用潜力。但是,由于柔性材料具有低刚度、易变形的特点,柔性执行机构普遍存在着驱动能力弱、运动精度差的问题,给柔性机器人的灵活运动和精确控制带来挑战。

柔性微型机器人结构与工作原理示意图
图A:柔性微型机器人基本结构;图B:静电足垫结构;图C:摩擦力控制原理。
近日,清华大学深圳国际研究生院先进制造学部张旻、王晓浩团队和美国加州大学伯克利分校林立伟团队合作,在前期柔性机器人压电谐振高效驱动结构的研究基础上,提出了利用静电调控摩擦力实现柔性微型机器人高速转向控制的方法。机器人全长30mm,由柔性单晶压电结构驱动,通过在机器人足部添加静电足垫和机器人4自由度模型设计优化,进行驱动与静电吸附协同控制,实现了482º/s的转向速度和28身长/s2的转向加速度,达到了已报道微型机器人的最高转向速度,与蟑螂等陆地节肢动物相当。此外,机器人可在5.6秒内通过总长1.2m的迷宫路径。
在此基础上,为了摆脱电缆的束缚,通过优化负载结构,机器人进一步实现了无缆独立运动。通过携带的控制电路、电池、传感器等,实现了自动寻迹和轨迹控制。
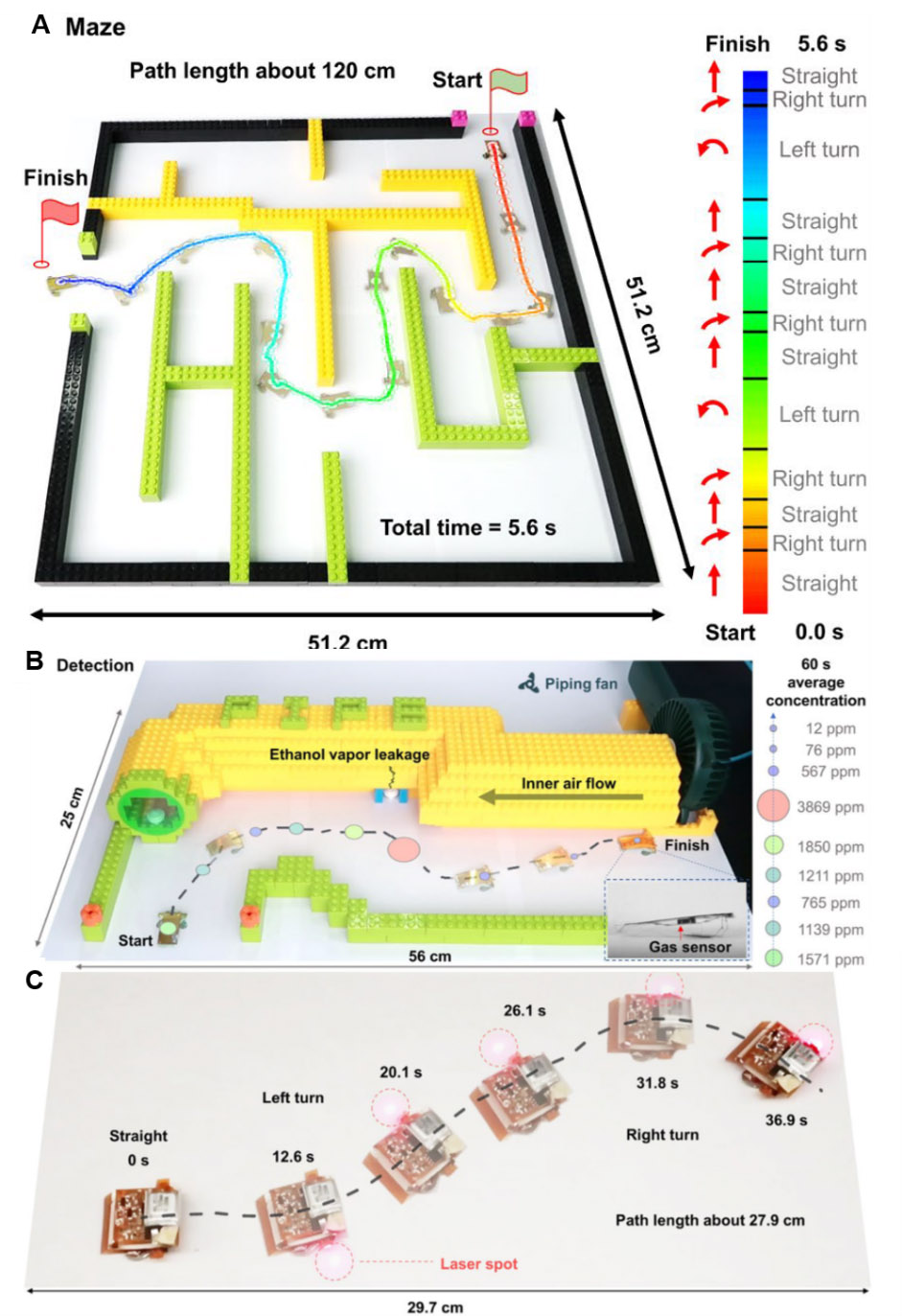
机器人执行不同任务演示图
图A:拖缆机器人在5.6秒内通过1.2m长的迷宫轨道;图B:拖缆机器人携带气体传感器记录VOC浓度分布;图C:无缆机器人行走“S”形轨迹。
相关成果近日以“基于静电足垫的高机动性昆虫尺寸柔性机器人轨迹控制”(Electrostatic footpads enable agile insect-scale soft robots with trajectory control)为题发表在《科学·机器人》(Science Robotics)上,这是该团队第二次在《科学·机器人》上发表延续性工作。清华大学深圳国际研究生院张旻副研究员、澳门大学钟俊文助理教授和美国加州大学伯克利分校林立伟教授为本文通讯作者,论文第一作者为清华伯克利深圳学院2016级仪器科学与技术专业博士生梁家铭和电子科技大学讲师吴一川,论文作者还包括清华大学深圳国际研究生院研究员王晓浩,2019级仪器仪表工程专业硕士生陈慧敏、苗子聪,2019级仪器科学与技术专业博士生刘含笑等。论文第一单位为清华-伯克利深圳学院。
论文链接:
https://robotics.sciencemag.org/content/6/55/eabe7906.full
供稿:深圳国际研究生院
编辑:李华山
审核:吕婷