清华新闻网2月12日电 三维打印技术作为科学研究和工业生产的重要工具,其高效率、高精度的性能突破关系到生物医学、微纳科技等多个前沿领域的发展。现有的三维打印技术存在较为突出的“速度和精度”的矛盾:传统逐点、逐层打印技术虽能保障精度,但打印效率较低,毫米级物体往往需要数十分钟甚至数小时才能完成加工,难以适配实际科研与生产的需求;现有的体积打印技术,如计算轴向光刻(CAL),采用一体成型的打印方式提升了速度,却受限于容器需旋转和景深不足等因素,样本在景深外的打印精度显著下降,且只能使用高粘度材料防止样品下沉,适用范围受到较大限制。
清华大学成像与智能技术实验室长期深耕于计算光学领域,十余年来在显微成像、天文成像、光计算等多个方向取得了突出成果与广泛应用。研究中,团队发现计算光学不仅可用于“捕捉光场信息”(如成像观测),还能反向应用于“利用光场构建物体”(如三维打印)。基于这一发现,团队将计算光学技术拓展到增材制造领域,通过成像光路的逆过程设计系统,实现了从信息获取到实体制造的技术跨越。研究团队历经五年攻关,逐步攻克了多视角光场的高速调控、拓展景深的全息图案优化算法设计、基于数字自适应光学的高精度光路矫正等一系列难题,最终研发出了“数字非相干合成全息光场(DISH)”三维打印技术。
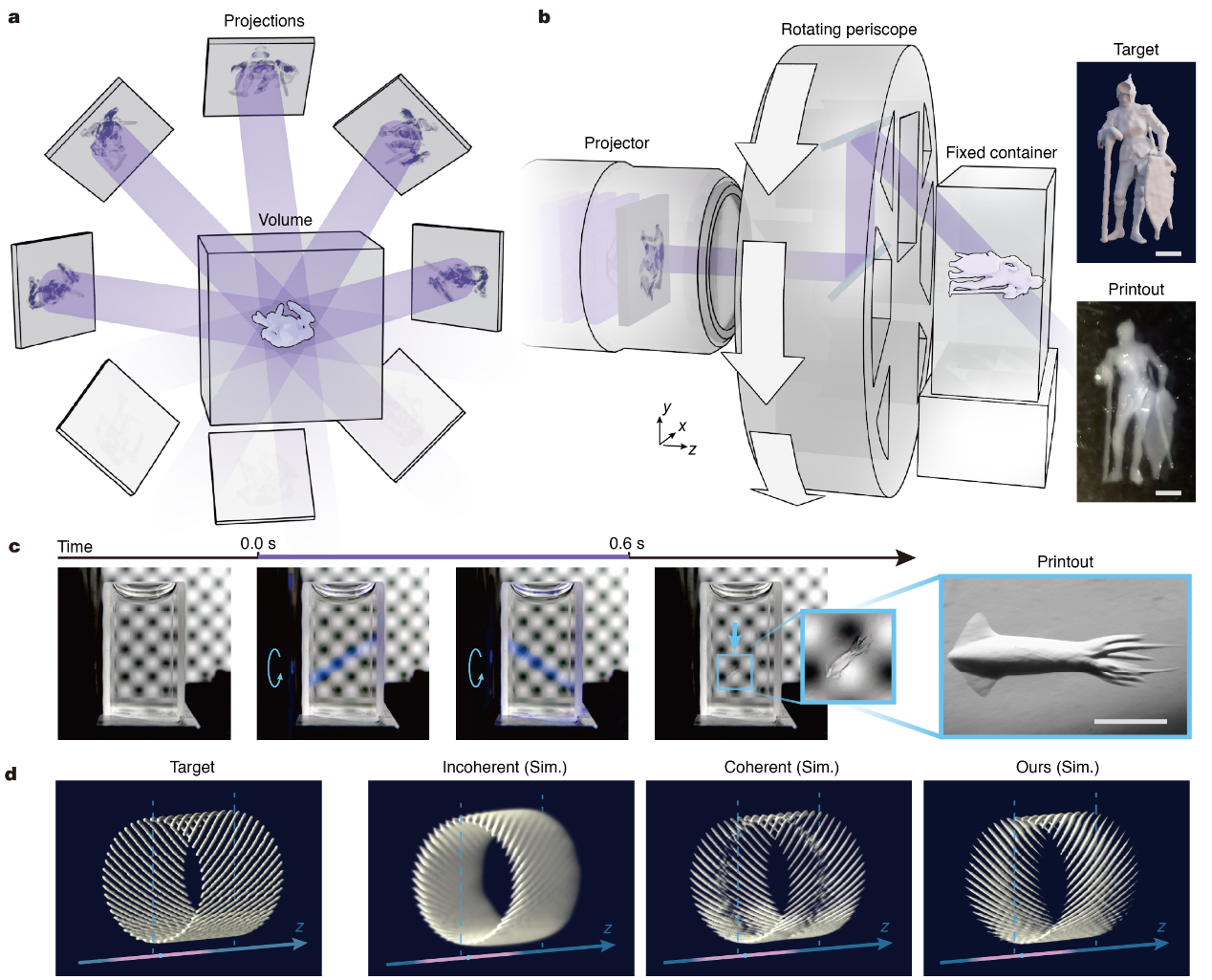
系统设计图
DISH 技术的核心创新,是将计算光学领域“记录高维成像过程,计算重构三维场景”的思路反转,变成“调控高维光场,直接创造三维实体”,改变了传统三维打印的底层逻辑。传统三维打印不管是逐点还是逐层的构建方式,都离不开容器、打印材料与探头之间的精密机械运动。这种打印模式不仅降低了传统方法的打印效率,还对其容器结构、材料粘度等进行了相对严格的限制。而DISH 技术受光场显微成像逆过程的启发,确保了打印期间容器和材料全程静止,并将三维实体的成型问题,转化为了高速精准调控并投影三维全息光场的光学问题。
借助创新的光学系统设计,DISH系统突破了逐点或逐层扫描模式的速度瓶颈,可在极短时间内精准投影出复杂的三维光强分布。实验表明,该技术生成毫米尺寸复杂结构的曝光时间仅需0.6秒,体积打印速率达333 mm³/s,相当于每秒生成1.25×10⁸个体素。这创造了体积三维打印曝光时间的新纪录,远超传统体积打印技术的30秒水平,更是传统逐点、逐层打印技术几分钟到数小时的加工耗时所无法企及的。
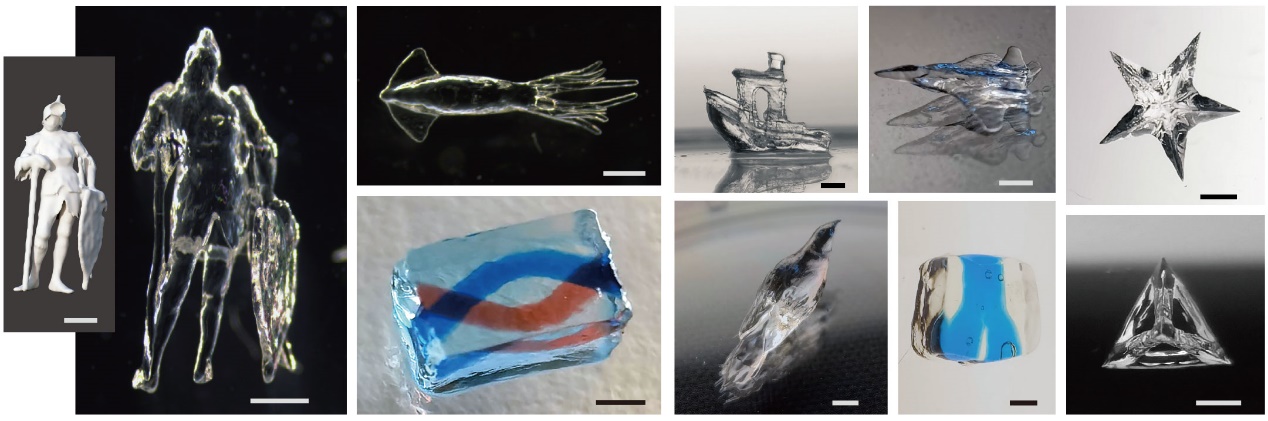
复杂结构打印产物展示
在传统体积三维打印技术中,重力所导致的样本下沉将引起材料流动,这会严重影响成型质量,因此只能选用高粘度材料抑制流动。而DISH技术凭借超短的曝光时间,将材料流动的影响大幅削弱,使得该技术能够兼容从与水粘度接近的稀溶液到近似固态的高粘度树脂等多种材料。
DISH技术对打印容器的要求极为简便,只需容器具备一个光学平面即可,无需特殊形状设计;且打印过程中容器保持静止,无需像传统方法那样要求容器或载物台与探头之间进行高精度相对运动。这一特性让打印场景得到极大拓展,尤其能够直接在普通的流体管道内放置打印材料,实现流体环境中的批量、连续打印。这种无需复杂工装、直接适配管道等特殊场景的打印能力,是传统依赖精准机械运动或专用容器的打印技术无法完成的。
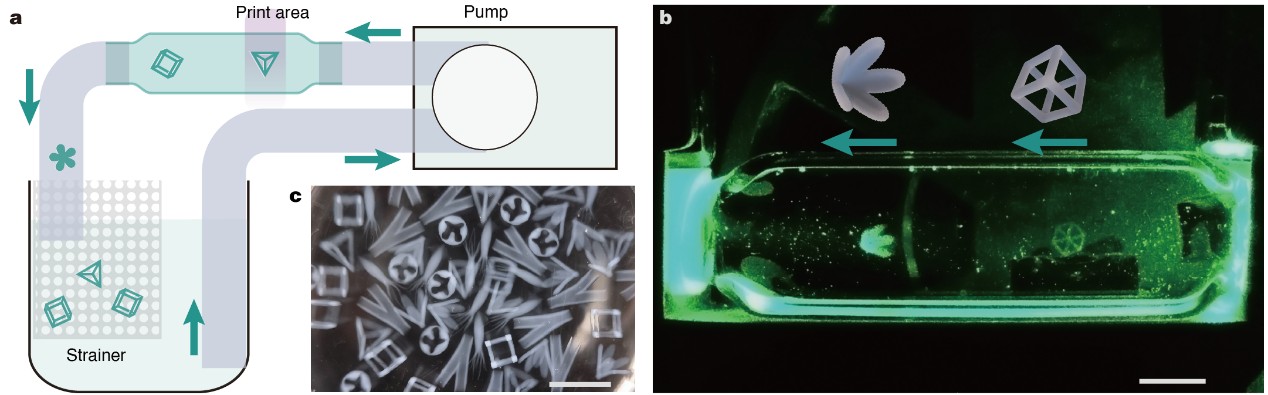
管道内全自动超快连续三维打印,每次均可打印不同的三维形状
除此之外,传统打印技术普遍存在“焦面附近精度高、离焦区域精度衰减”的问题,核心原因是缺乏有效的景深拓展手段。而DISH技术通过自适应光学校准、像差矫正算法与全息算法的深度融合,从根本上解决了这一难题:像素级校准系统可精准补偿光场传播中的像差与偏移,自主研发的像差校正和三维全息算法则将同参数条件的景深从传统的50微米拓展至1厘米。经实验验证,系统的光学分辨率在1厘米范围内始终保持11微米,打印产物最细独立特征可达12微米。
这项技术能够用生物相容性材料打印模拟血管的螺旋管、分叉管,甚至在培养皿、生物组织上“原位打印”,为组织工程、高通量药物筛选打开新通道。在工程制造领域,它有望融入流水线,批量生产光子计算器件、手机相机模组等微型组件,打印带有尖锐角度、复杂曲面的零件等。在未来,它还有望在容器内堆叠不同功能的材料,实现“多材料打印”,从而拓展到柔性电子、微型机器人、高分辨率组织模型等场景。作为多学科交叉研究成果,DISH技术整合了光学工程、控制理论、人工智能算法、材料科学等领域的技术优势,为相关领域技术升级提供了新的解决方案。
该成果于北京时间2026年2月12日以“基于全息光场合成的亚秒级体积三维打印”(Sub-second Volumetric 3D Printing by Synthesis of Holographic Light Fields)为题发表在《自然》(Nature)上。清华大学自动化系成像与智能技术实验室的戴琼海院士、吴嘉敏副教授和电子系方璐教授为共同通讯作者;自动化系博士后王旭康、马远瞩,电子系博士生牛一涵为共同第一作者;清华大学熊博、张安科、张国勋、陈一帆,浙江大学魏威为共同参与者。该研究得到国家自然科学基金委、国家科技部等项目的资助支持。
论文链接:
https://www.nature.com/articles/s41586-026-10114-5
供稿:自动化系
图片设计:李秦圩
编辑:邱收
审核:周襄楠