Tsinghua University’s Center for Urban Science and Computation, Department of Electronics Engineering have recently collaborated with the School of Architecture to reach a milestone in the field of intelligent urban planning. They have proposed for the first time a reinforcement learning model for urban planning, that realizes a collaborative urban planning workflow between human planners and AI, which provides a brand-new way of intelligent urban planning. The work has been published online in Nature Computational Science under the title "Spatial Planning of Urban Communities via Deep Reinforcement Learning". This work demonstrates the strong power of AI technique in solving complicated problems of urban planning, which provides efficient solutions for the “15-minute city”, enabling the sustainable development of cities. In a concurrent News & Views article, Paolo Santi, a principal research scientist at the MIT Senseable City Lab, commented, “While addressing important conceptual and computational challenges and demonstrating the feasibility of an integrated human–AI workflow for spatial layout planning, the work of Zheng et al. leaves many avenues open for future research.”

Urban planning is both an old and young discipline. It has existed since the birth of cities, while its theory and practice are constantly and rapidly developing and improving. Scholars in the field of urban science have been studying the automation of urban planning since the middle of the last century, striving to release urban planners from tedious tasks through the development of computational urban models and planning support tools. For example, American system scientist JW Forrester proposed urban dynamics in 1970, and British urbanist Michael Batty proposed planning support tools in 1995. However, due to limitations in data, algorithms, and computing power, the layout of land use and road in current planning practice still relies heavily on the experience and intuition of human planners, far from automation.
With the breakthrough development of AI technology in the last decade, especially the powerful ability of reinforcement learning algorithms to perform multi-objective optimization in a huge solution space has been explored in solving many similar planning-type problems (For example in Go and chip design among other applications).that previously relied on human intuition, which makes it possible to utilize the powerful computational ability of AI for land use and road layout. The development of AI-enabled urban planning tools can be of great scientific and applied value by improving the productivity of human planners and allowing them to focus more on creative works.

(a)graph reformulation of land use layout.(b) graph reformulation of road layout.

The proposed reinforcement learning approach(a)GNN state encoder(b)Land use policy network.(c)Value network.(d)Road policy network(e)Markov decision process on the graph for urban planning.
The Center for Urban Science and Computation Research at Department of Electronics, Tsinghua University, commenced the research on governance, planning and decision-making in urban complex environments in 2014. Led by Professor Yong Li of the Research Center, the group's doctoral student Yu Zheng and others, based on the group's technical accumulation in urban computational modeling and deep reinforcement learning algorithms, and in cooperation with Professor Tinghai Wu's team of the School of Architecture, the research center innovatively proposed a spatial planning method based on deep reinforcement learning for urban communities. Through millions of planning interactions with a simulated city environment, the proposed AI model can master the skills of urban planning from massive data, optimizing spatial efficiency and achieving super-human level performance. Meanwhile, since urban communities are diverse and irregular, making it inapplicable to use convolutional neural networks which have been widely adopted in tasks with regular inputs such as Go and chip design. To address this challenge, the proposed model tackles urban planning from the topological level, which utilizes a graph representation to provide a unified representation for urban communities of arbitrary forms. After transforming urban planning to a Markov decision-making process on an urban contiguity graph, the proposed approach takes full advantage of the ability of deep reinforcement learning algorithms to efficiently search in huge solution spaces, achieving intelligent layout of land use and road for urban communities. Experiments on two communities in Beijing demonstrate that the proposed approach significantly outperforms existing methods and human experts. In addition, through a human-AI collaborative workflow, the proposed model can greatly improve the productivity of human designers and generate efficient spatial plans of different planning styles.
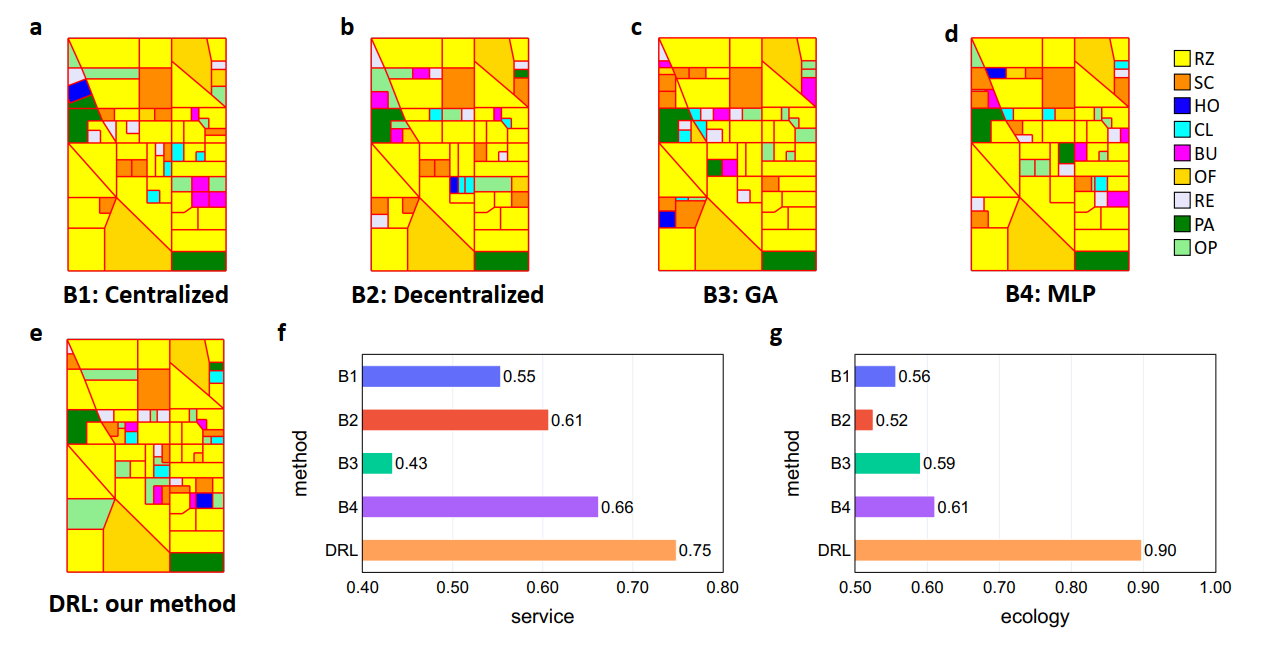
Comparison between the proposed method and existing approaches(a-e)spatial plans of different methods:a centralized heuristic,b decentralized heuristic,c genetic algorithm,d RL model with a multi-layer perceptrons,e the proposed method.(f-g)performance comparison with respect to metrics of “15-minute city”:f service,g ecology

Comparison between the proposed method and human experts(a-b)Ecology and service performance for two communities in Beijing:a Huilongguan,b Dahongmen.(c-d)Subjective blind tests for two communities in Beijing:c Huilongguan,d Dahongmen.
Doctoral student Yu Zheng and associate Professor Yong Li from the Center for Urban Science and Computation Research at Department of Electronics, Tsinghua University, are lead author and corresponding author of this paper, respectively. Postdoctoral researcher Yuming Lin at Department of Electronics, Prof. Liang Zhao and Prof. Tinghai Wu at School of Architecture, Prof. Depeng Jin at Department of Electronics co-authored this paper. This work was supported in part by The National Key Research and Development Program of China under grant 2020AAA0106000 to Yong Li, and the National Natural Science Foundation of China under U1936217, U20B2060, and 61971267 to Yong Li.
Paper:
https://www.nature.com/articles/s43588-023-00503-5
Codes and data:
https://github.com/tsinghua-fib-lab/DRL-urban-planning
Editor: Li Han