
Liao Zhuxiu, a doctoral student from the School of Medicine at Tsinghua University, won the first award at the IFMBE Young Investigator Competition.
Liao Zhuxiu, a doctoral student from the School of Medicine at Tsinghua University, recently won the first award for a research paper titled "A Soft Robot Using Magnetic-pneumatic Hybrid Actuation that Functions in Unstructured Environments" at the final of the International Federation for Medical and Biological Engineering (IFBME) Young Investigator Competition in Suzhou, a city in East China's Jiangsu province.
The IFMBE Young Investigator Competition was held at the 12th IFMBE Asian Pacific Conference on Medical and Biological Engineering (APCMBE2023) and the 2023 China Biomedical Engineering Conference & Medical Innovation Summit (BME2023) from May 18th to 21st. The APCMBE2023 and BME2023 focused on major fields and core technologies in biomedical engineering and aimed to promote the integration of disciplinary development with medicine, enterprises, research, and education.
A total of 10 contestants, including Liao, out of over 2,000 participants, made it to the final competition.
Liao Zhuxiu, a doctoral student from the Department of Biomedical Engineering, School of Medicine, Tsinghua University, under the supervision of Professor Liao Hong'en, emerged as the sole recipient of the first award and received the title from professor Kang-Ping Lin, secretary-general of the IFMBE, and Magdalena Stoeva, secretary-general of the International Union of Physical and Engineering Sciences in Medicine (IUPESM) at the conference.
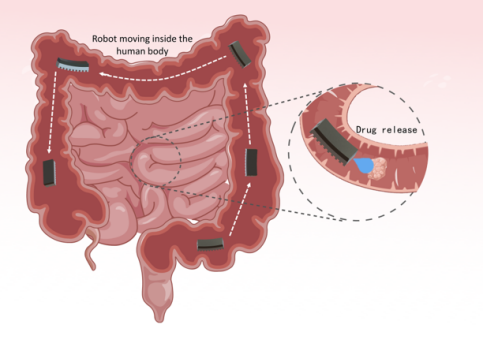
A schematic diagram of the clinical application of a magnetically-pneumatically hybrid-driven medical soft robot.
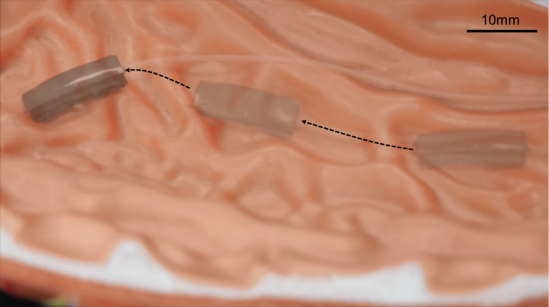
An experimental motion diagram of a magnetically-pneumatically hybrid-driven soft robot in a gastric phantom model.
Compared with traditional rigid robots, soft robots are known for their excellent flexibility, adaptability, and potential for miniaturization, demonstrating tremendous potential in both medical and industrial sectors. In his award-winning paper, Liao proposed a design plan for soft robots driven by a hybrid magnetic-pneumatic mechanism that achieves fast and controllable movement in various unstructured environments.
The research paper developed bionic movement gait models and actuation and control plans based on soft robots driven by magnetic-pneumatic hybridization. It achieved fast and precise management of soft robots and conducted lots of research in structural design, magnetization and sequential control of actuation to further enhance the movement of robots and their application in various scenarios.
In addition, the research emphasized the distinctive capabilities of soft robots in human-machine surgical operation including image collection, automatic transport and drug delivery, highlighting their significant potential in clinical medicine. These robotic functions can assist doctors in performing minimally invasive operations and natural orifice surgery with greater ease and precision.
The research received financial assistance from the National Natural Science Foundation, National Key Research & Development Projects and the Beijing Municipal Natural Science Foundation.
Editor:Li Han